1.1.4. ROS 1 - ROS 2 bridge¶
Another typical situation of systems using different protocols is that of ROS 1 and ROS 2.
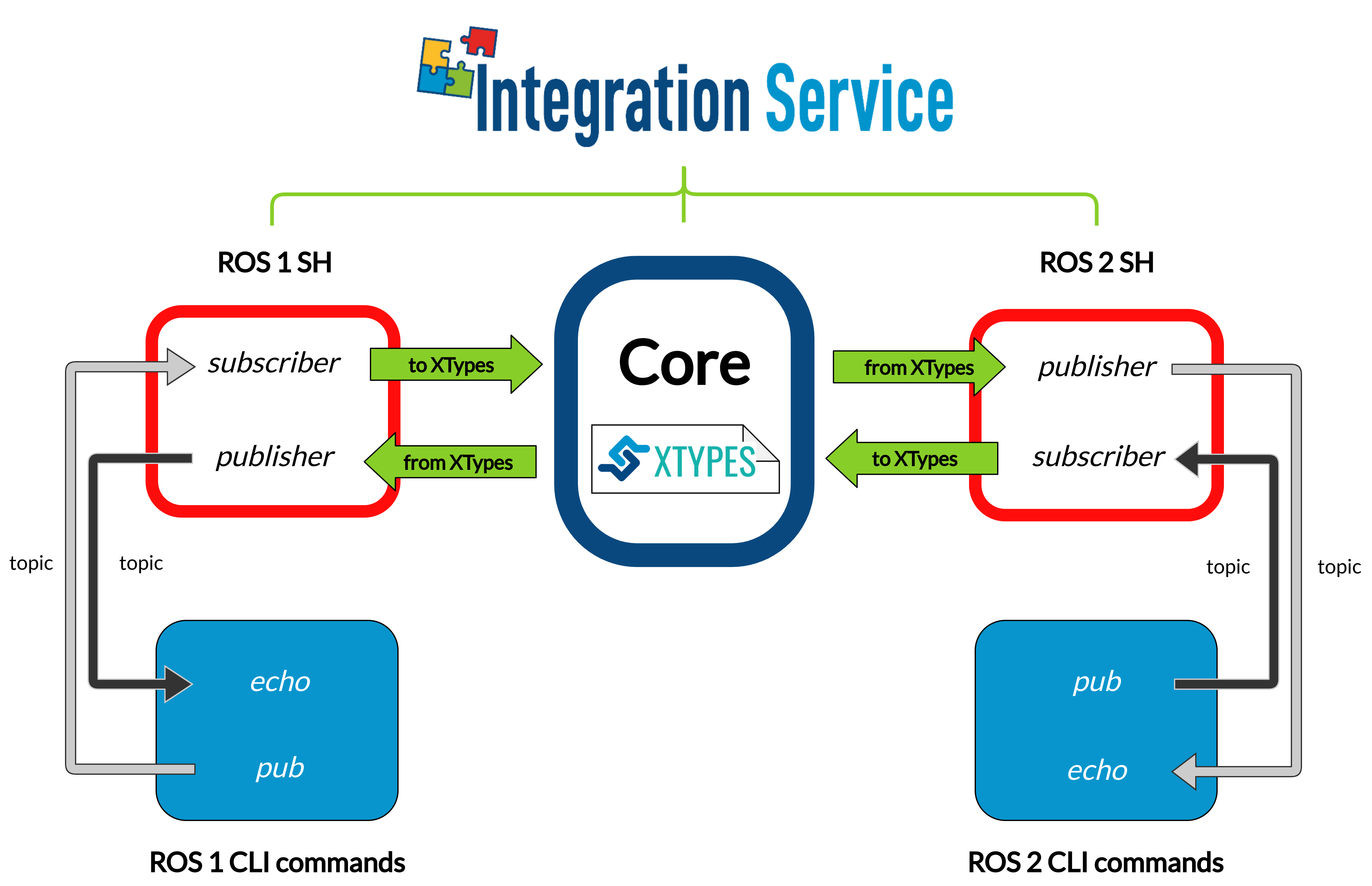
By using Integration Service, this communication can be achieved with minimum user’s effort. As both a ROS 1 System Handle and a ROS 2 System Handle already exist, the communication is straightforward.
In the example below, we show how Integration Service puts into communication two pub-echo examples, one from
ROS 2, and the other from ROS 1.
1.1.4.1. Requirements¶
To prepare the deployment and setup the environment, you need to have Integration Service correctly installed in your system. To do so, please follow the steps delineated in the Installation section.
Also, to get this example working, the following requirements must be met:
Having ROS 2 (Foxy or superior) installed, with the
talker-listenerexample working.Having the ROS 2 System Handle installed. You can download it from the ROS2-SH dedicated repository into the
is-workspacewhere you have Integration Service installed:cd ~/is-workspace git clone https://github.com/eProsima/ROS2-SH.git src/ROS2-SHHaving ROS 1 (Melodic or superior) installed, with the
pub-echoexample working.Having the ROS 1 System Handle installed. You can download it from the ROS1-SH dedicated repository into the
is-workspacewhere you have Integration Service installed:cd ~/dds-is-workspace git clone https://github.com/eProsima/ROS1-SH.git src/ROS1-SH
After you have everything correctly installed, build the packages by running:
source /opt/ros/$<ROS2_DISTRO>/setup.bash
colcon build --packages-skip-regex is-ros1
source /opt/ros/$<ROS1_DISTRO>/setup.bash
colcon build
1.1.4.2. Deployment¶
Below we explain how to deploy an example of this communication in both directions allowed.
ROS 1 pub to ROS 2 echo¶
To enable communication from ROS 1 to ROS 2, open four terminals:
In the first terminal, source the ROS 1 installation and run the
roscore:source /opt/ros/$<ROS1_DISTRO>/setup.bash roscoreIn the second terminal, source the ROS 1 installation and launch the ROS 1
pub:source /opt/ros/$<ROS1_DISTRO>/setup.bash rostopic pub -r 1 /hello_ros2 std_msgs/String "Hello, ros2"
In the third terminal, source the ROS 2 installation and launch the ROS 2
echo:source /opt/ros/$<ROS2_DISTRO>/setup.bash ros2 topic echo /hello_ros2 std_msgs/String
In the fourth terminal, go to the
is-workspacefolder, source the ROS 2, the ROS 1, and local installations, and execute Integration Service with theintegration-servicecommand followed by the ros1_ros2__helloworld.yaml configuration file located in thesrc/Integration-Service/examples/basicfolder:cd ~/is-workspace source /opt/ros/$<ROS2_DISTRO>/setup.bash source /opt/ros/$<ROS1_DISTRO>/setup.bash source install/setup.bash integration-service src/Integration-Service/examples/basic/ros1_ros2__helloworld.yaml
Once Integration Service is launched, the ROS 1 pub and the
ROS 2 echo will start communicating.
ROS 2 pub to ROS 1 echo¶
To enable communication from ROS 2 to ROS 1, open four terminals:
In the first terminal, source the ROS 1 installation and run the
roscore:source /opt/ros/$<ROS1_DISTRO>/setup.bash roscoreIn the second terminal, source the ROS 2 installation and launch the ROS 2
pub:source /opt/ros/$<ROS2_DISTRO>/setup.bash ros2 topic pub -r 1 /hello_ros1 std_msgs/String "{data: \"Hello, ros1\"}"
In the third terminal, source the ROS 1 installation and launch the ROS 1
echo:source /opt/ros/$<ROS1_DISTRO>/setup.bash rostopic echo /hello_ros1
In the fourth terminal, go to the
is-workspacefolder, source the ROS 2, the ROS 1, and local installations, and execute Integration Service with theintegration-servicecommand followed by the ros1_ros2__helloworld.yaml configuration file located in thesrc/Integration-Service/examples/basicfolder:cd ~/is-workspace source /opt/ros/$<ROS1_DISTRO>/setup.bash source /opt/ros/$<ROS2_DISTRO>/setup.bash source install/setup.bash integration-service src/Integration-Service/examples/basic/ros1_ros2__helloworld.yaml
Once Integration Service is launched, the ROS 2 pub and the
ROS 1 echo will start communicating.