1. Integration Service Core¶
The is-core library defines a set of abstract interfaces and provides some utility classes
that form a plugin-based framework.
A single integration-service executable instance can connect N middlewares,
where each middleware has a plugin, or System Handle associated with it.
The System Handle for a middleware is a lightweight wrapper around that middleware (e.g. a ROS node or a WebSocket
server/client). The is-core library provides CMake functions that allow these middleware
System Handles to be discovered by the integration-service executable at runtime after the System Handle
has been installed.
A single integration-service instance can route any number of topics or services to/from any number of
middlewares.
Because of this, downstream users can extend Integration Service to communicate with any middleware.
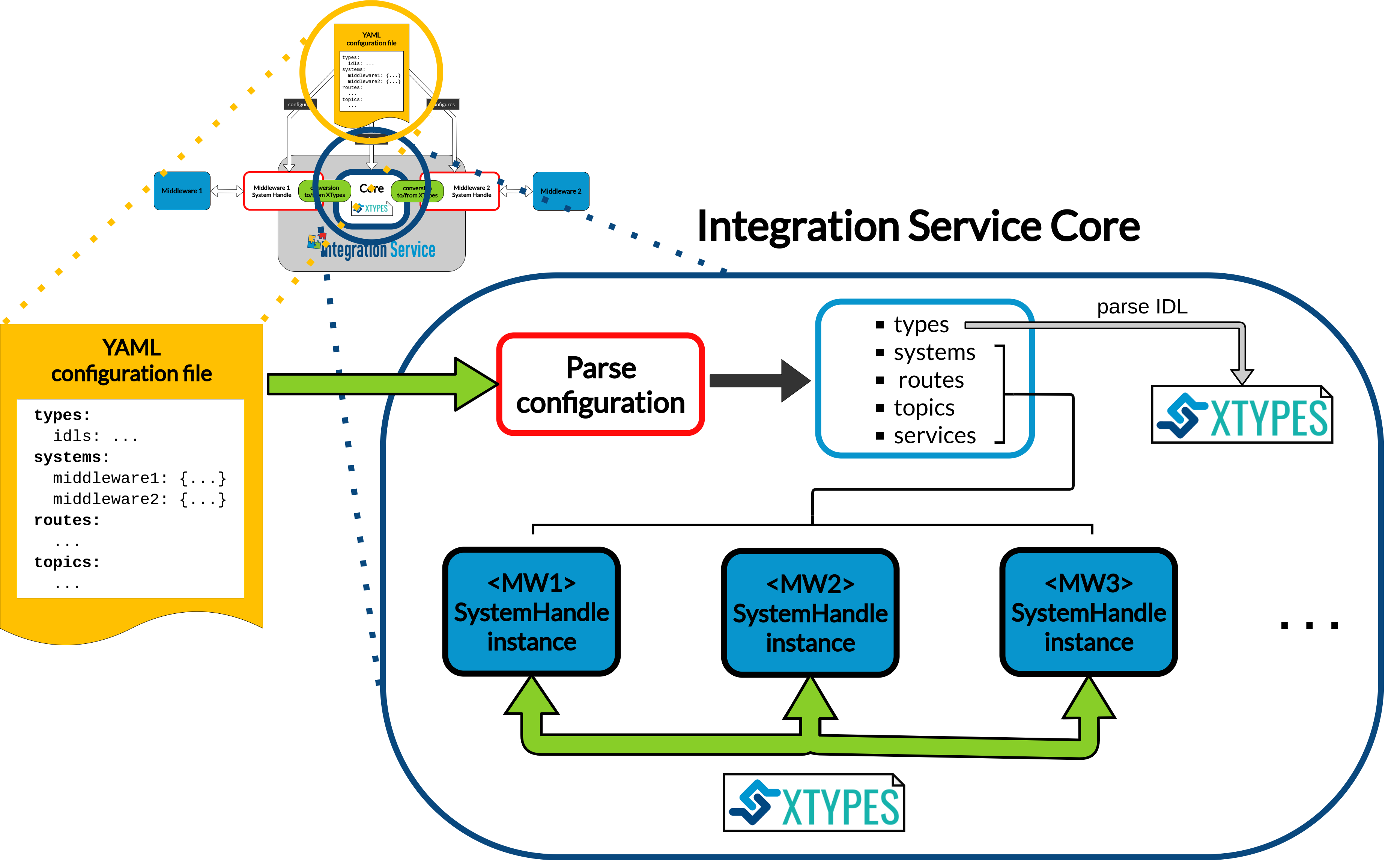
According to the diagram depicted above, the Integration Service Core executes the following steps:
Parse the YAML configuration file. This file must contain everything needed to successfully launch an Integration Service instance. To get a detailed view on how to write a configuration file for the Integration Service, please refer to the YAML Configuration section of this documentation.
If the configuration parsing process ended successfully, IDL types are parsed and registered within the Integration Service Core type registry database. This will allow to later define the required topics and services types that will take part in the intercommunication process.
The IDL parsing procedure is fulfilled thanks to the built-in parser provided with the xTypes library. More information about how this library works and why it is extremely useful for Integration Service can be found in the section below.
According to the specified systems, the corresponding System Handles dynamic libraries are loaded.
Please take into account that each system type must match on of those supported by Integration Service. A table with every built-in provided System Handle and their corresponding source code GitHub repositories can be found here.
If a user wants to incorporate a new protocol into the Integration Service ecosystem to use it in his or her Integration Service application instance, the specific System Handle must be implemented first. Please refer to the System Handle implementation section of the documentation.
Next, the routes are processed, and links between the routed systems are established.
For example, if a route consists on establishing a link
fromMiddleware_1toMiddleware_2, the Integration Service Core will internally register:A Middleware_1 TopicSubscriber.
A Middleware_2 TopicPublisher.
The Middleware_1 TopicSubscriber will be listening to a certain Middleware_1 topic publisher. This subscriber registers a callback that internally converts the middleware-specific data type instance into a Dynamic Data, using xTypes for that purpose, and forwards the converted data instance to the Middleware_2 TopicPublisher, which will then publish it so that it can be consumed by the final endpoint destination, that is, a Middleware_2 subscriber.
For the defined topics and services, the topic/service name are registered within the Integration Service Core, prior to check that the specified type exists and has been previously registered within the type registry. Each topic/service must use one of the provided routes in the configuration file.
If all these steps are correctly fulfilled, an Integration Service instance is launched and starts listening for incoming messages to translate them into the specified protocols. The green arrow on the diagram depicts this behavior. Notice that xTypes is the common language representation used for transmitting the data among System Handles, so we will introduce this library right away.
1.1. The xTypes library¶
eProsima xTypes is a fast and lightweight C++17 header-only implementation of the OMG DDS-xTypes standard.
This library allows to create Dynamic Type representations at runtime, by means of feeding the provided parser with an IDL type definition. For example, given the following IDL:
struct Inner {
long a;
};
struct Outer {
long b;
Inner c;
};
xTypes provides with an easy and intuitive API to retrieve the structured dynamic type:
xtypes::idl::Context context = idl::parse(my_idl);
const xtypes::StructType& inner = context.module().structure("Inner");
const xtypes::StructType& outer = context.module().structure("Outer");
The Integration Service Core uses xTypes as the common representation language for transmitting information between each System Handle instance that is desired to establish a communication between. To do so, System Handles must provide a way to convert their specific data types instances into/from xTypes. An example on how this procedure would look like for a System Handle, that is, the FastDDS System Handle, can be found here.