eProsima Integration Service
eProsima Integration Service is a tool that enables intercommunicating an arbitrary number of protocols that speak different languages.
If one has a number of complex systems and wills to combine them to create a larger, even more complex system, Integration Service can act as an intermediate message-passing tool that, by speaking a common language, centralizes and mediates the integration.
The communication between the different protocols is made possible by system-specific plugins, or System Handles. These provide the necessary conversion between the target protocols and the common representation language spoken by Integration Service, based on an implementation of the xTypes specification. Once a system is communicated with the core, it enters the Integration Service world and can straightforwardly reach out to any other system that already exists in this world.
Integration Service is configured by means of a YAML text file, through which the user can provide a mapping between the topics and services handled by the middlewares of the systems involved.
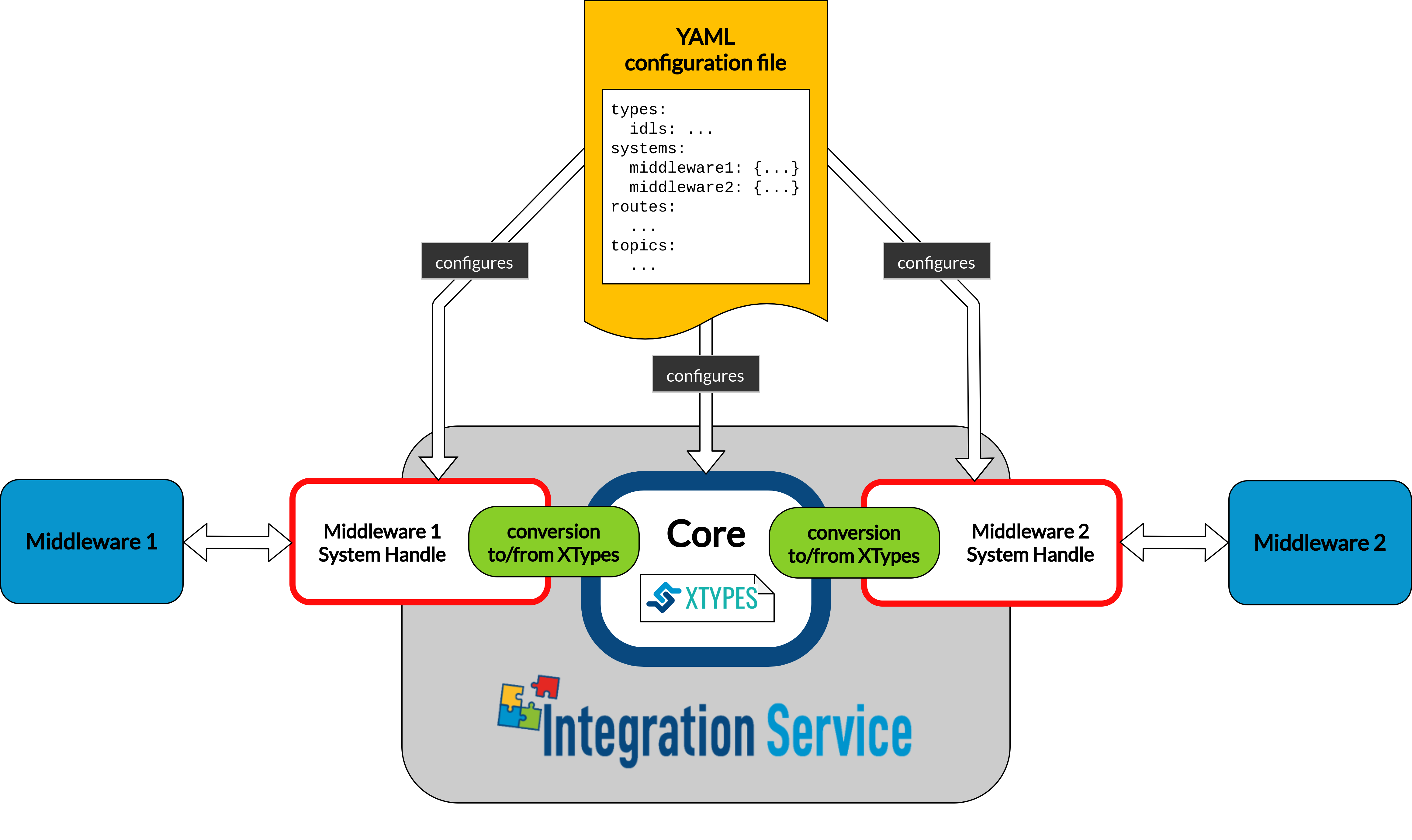
Integration Service comprises the following elements:
The Integration Service Core engine.
The System Handles or plugins, for each supported protocol.
A YAML Configuration file, which follows a specific syntax.
Integration Service Core¶
Integration Service provides a plugin-based platform that is easily and intuitively configurable. An Integration Service instance can connect N middlewares through dedicated plugins that speak the same language as the core. This common language is eProsima xTypes; a fast and lightweight OMG DDS-XTYPES standard C++17 header-only implementation. Find more information on the core and on the xTypes representation language in the Integration Service Core user manual of this documentation.
System Handles¶
The plugins, or System Handles, are discovered by Integration Service at runtime after they have been installed.
Available System Handles up-to-date are listed below:
System Handle |
Repository |
|---|---|
Fast DDS System Handle |
|
FIWARE System Handle |
|
ROS 1 System Handle |
|
ROS 2 System Handle |
|
WebSocket System Handle |
New System Handles for additional protocols can be easily created, automatically allowing communication of the new protocol with the middlewares that are already supported.
The plugin-based framework is specially advantageous when it comes to integrating a new component into a complex system where the rest of sub-systems use incompatible protocols. Indeed, once all protocols of interest are communicated with the core, each via a dedicated System Handle, the integration happens straightforwardly. The great advantage of using Integration Service is that it relies on centralization rather than on the creation of dedicated bridges for each pair of components. For a system made of N components, this means that the number of new software parts to add grows as N rather than N².
For further information, please refer to the System Handle specific user manual of the documentation.
YAML configuration files¶
Integration Service is configured by means of a YAML file that specifies a set of compulsory fields, plus some optional ones.
This configuration approach is especially profitable when it comes to integrating large systems, since a single YAML file is needed no matter how many protocols are being communicated.
The strength of this approach is that different translations are possible by only changing the configuration file. This means that no compilation steps are required between each Integration Service instantiation, as it is configured at runtime.
Detailed information on how to configure an Integration Service-mediated communication via a YAML file can be found in the YAML configuration user manual of this documentation.
Main features¶
Free and Open Source: The Integration Service Core, and all System Handles available to date are free and open source.
Easily configurable: As detailed above, an Integration Service instance is easily configurable by means of a YAML file. For more information on how to do so, please consult the YAML Configuration user manual of this documentation.
Easy to extend to new platforms: New platforms can easily enter the Integration Service world by generating the plugin, or System Handle needed by the core to integrate them. For more information on System-Handles, please consult the System Handle user manual of this documentation.
Easy to use: Installing and running Integration Service is intuitive and straightforward. Please refer to the installation manual to be guided through the installation process.
Typical use-cases¶
Integration Service comes in handy for a varied set of application scenarios, such as:
Communication among systems using different protocols which handle incompatible types, topics, and services. A complete list of the available examples described for this use-case scenario can be found here.
Integration of systems under the same protocol which are isolated per specific protocol features. A complete list of the available examples described for this use-case scenario can be found here.
Communication through the Internet between systems hosted by logically separated WANs located in different geographical regions. A complete list of the available examples described for this use-case scenario can be found here.
Structure of the documentation¶
This documentation is organized into the sections listed below:
Contact and commercial support¶
Find more about us at eProsima’s webpage.
Support available at:
Email: support@eprosima.com
Phone: +34 91 804 34 48