1.1.2. DDS - ROS 2 using QoS¶
In this example, we show how to use Quality of Service policies within ROS 2 entities using Integration Service. To do so, we use a widely extended case in the robotics world: the bridge between DDS and ROS 2. Specifically, we discuss how to do so with the Fast DDS implementation.
A user with knowledge of ROS 2 systems can know how the QoS are applied and what effect they would have on each of the entities. But in this case, we are going to explain how the YAML file should be configured so that these QoS are made effective in the internal entities of Integration Service.
The steps described below address such a situation, by putting into communication a ROS 2 CLI publisher,
using compatible and incompatible QoS on each case, with the Fast DDS DDSHelloWorld example.
1.1.2.1. Requirements¶
To prepare the deployment and setup the environment, you need to have Integration Service correctly installed in your system. To do so, please follow the steps delineated in the Installation section.
Also, to get this example working, the following requirements must be met:
Having ROS 2 (Foxy or superior) installed.
Having the ROS 2 System Handle installed. You can download it from the ROS2-SH dedicated repository into the
is-workspacewhere you have Integration Service installed:cd ~/is-workspace git clone https://github.com/eProsima/ROS2-SH.git src/ROS2-SHHaving Fast DDS (v.2.0.0 or superior) installed and the Integration Service
DDSHelloWorldexample working. This example can be found in the main Integration Service repository, under the examples/utils/dds/DDSHelloWorld folder; to compile it, you can either compile the whole Integration Service project usingcolconwith the CMake flagBUILD_FASTDDS_EXAMPLESenabled; or execute the following steps:cd ~/is-workspace/src/Integration-Service/examples/utils/dds/DDSHelloWorld mkdir build && cd build cmake .. -DBUILD_EXAMPLES=ON && make
Having the Fast DDS System Handle installed. You can download it from the FastDDS-SH dedicated repository into the
is-workspacewhere you have Integration Service installed:cd ~/is-workspace git clone https://github.com/eProsima/FastDDS-SH.git src/FastDDS-SH
After you have everything correctly installed in your is-workspace, build the packages by running:
cd ~/is-workspace
colcon build --cmake-args -DBUILD_FASTDDS_EXAMPLES=ON
1.1.2.2. Deployment¶
Below we explain how to deploy this example of communication with compatible and incompatible durability QoS.
The YAML used for this example consist of a ROS 2 publisher that send messages on the topic hello_dds.
Depending on its durability kind that messages are redirected using Integration Service to the topic
hello_v_dds if it compatible with volatile subscribers and to the topic hello_t_dds if it is
compatible with transient_local subscribers.
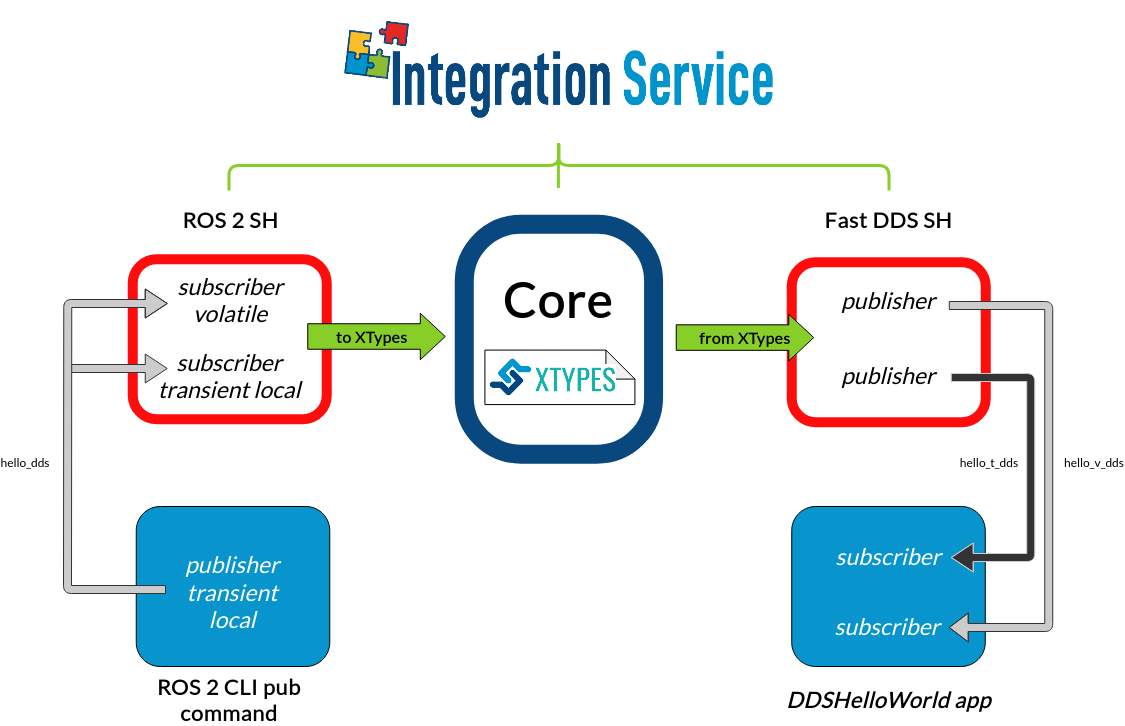
ROS 2 transient local CLI publisher to DDS subscribers¶
To enable communication from ROS 2 to Fast DDS, open four terminals:
In the first terminal, source your ROS 2 installation and execute a ROS 2 CLI publication instruction with durability
transient_local:source /opt/ros/$<ROS2_DISTRO>/setup.bash ros2 topic pub /hello_dds std_msgs/msg/String "{ data: 'Hello' }" --qos-durability transient_local
In the second terminal, execute a Fast DDS HelloWorld
subscriberon the topichello_v_ddsfrom within theis-workspace:cd ~/is-workspace source install/setup.bash ./build/is-examples/dds/DDSHelloWorld/DDSHelloWorld -m subscriber -n hello_v_dds
In the third terminal, execute another Fast DDS HelloWorld
subscriberon the topichello_t_ddsfrom within theis-workspace:cd ~/is-workspace source install/setup.bash ./build/is-examples/dds/DDSHelloWorld/DDSHelloWorld -m subscriber -n hello_t_dds
At this point, the three applications cannot communicate due to the incompatibility of their topics and types. This is where Integration Service comes into play to make the communication possible.
In the third terminal, go to the
is-workspacefolder, source the ROS 2 and local installations, and execute Integration Service with theintegration-servicecommand followed by the fastdds_ros2__qos_helloworld.yaml configuration file located in thesrc/Integration-Service/examples/basicfolder:cd ~/is-workspace source /opt/ros/$<ROS2_DISTRO>/setup.bash source install/setup.bash integration-service src/Integration-Service/examples/basic/fastdds_ros2__qos_helloworld.yaml
Once the last command is executed, the three applications will start communicating, since the transient_local
durability defined for the ROS 2 publisher is compatible with volatile and transient_local subscribers.
The following diagram describes the data flow between all the involved applications.
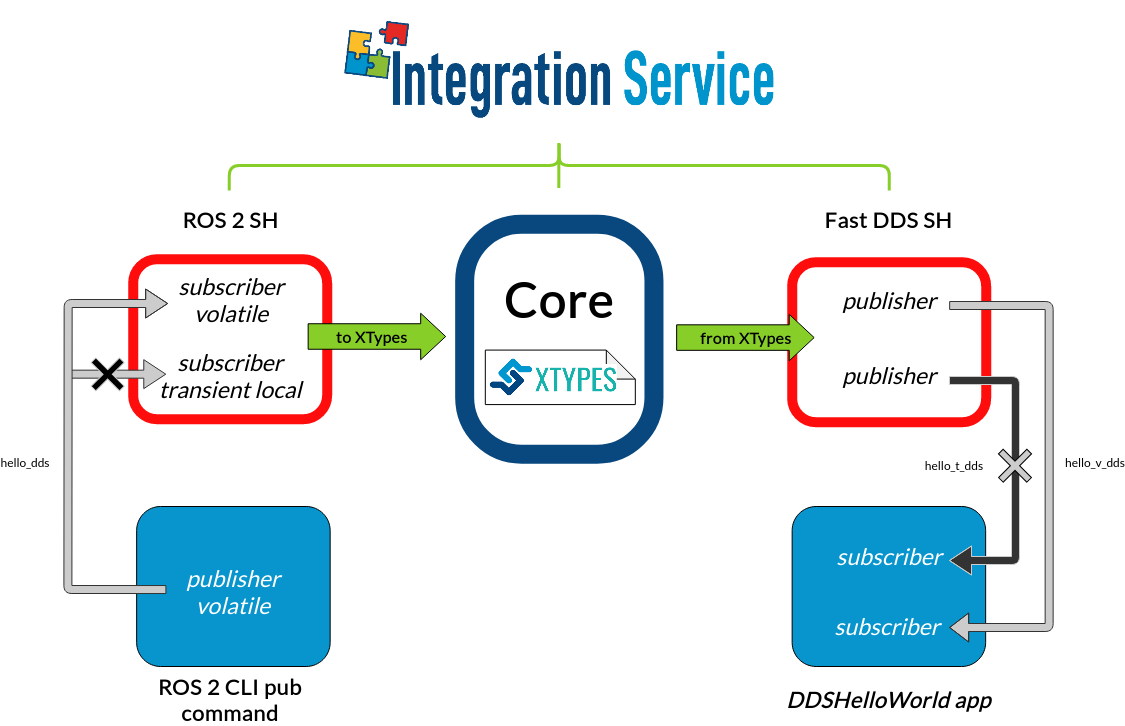
ROS 2 volatile CLI publisher to DDS subscriber¶
To enable communication from Fast DDS to ROS 2, open four terminals:
In the first terminal, source your ROS 2 installation and execute a ROS 2 CLI publication instruction with durability
volatile:source /opt/ros/$<ROS2_DISTRO>/setup.bash ros2 topic pub /hello_dds std_msgs/msg/String "{ data: 'Hello' }" --qos-durability volatile
In the second terminal, execute a Fast DDS HelloWorld
subscriberon the topichello_v_ddsfrom within theis-workspace:cd ~/is-workspace source install/setup.bash ./build/is-examples/dds/DDSHelloWorld/DDSHelloWorld -m subscriber -n hello_v_dds
In the third terminal, execute another Fast DDS HelloWorld
subscriberon the topichello_t_ddsfrom within theis-workspace:cd ~/is-workspace source install/setup.bash ./build/is-examples/dds/DDSHelloWorld/DDSHelloWorld -m subscriber -n hello_t_dds
At this point, the three applications cannot communicate due to the incompatibility of their topics and types. This is where Integration Service comes into play to make the communication possible.
In the third terminal, go to the
is-workspacefolder, source the ROS 2 and local installations, and execute Integration Service with theintegration-servicecommand followed by the fastdds_ros2__qos_helloworld.yaml configuration file located in thesrc/Integration-Service/examples/basicfolder:cd ~/is-workspace source /opt/ros/$<ROS2_DISTRO>/setup.bash source install/setup.bash integration-service src/Integration-Service/examples/basic/fastdds_ros2__helloworld.yaml
Once the last command is executed, the two volatile applications will start communicating, since the volatile
durability defined for the ROS 2 publisher is only compatible with volatile subscribers.
The following diagram describes the data flow between all the involved applications.