3.1. WAN-TCP tunneling over DDS¶
One of the most critical and powerful use-cases of Integration Service is that of two systems located in different geographical regions which need to communicate through the Internet, using a WAN connection.
Using a pair of Integration Service instances, one for each system, this scenario can be addressed with a secure TCP tunnel thanks to the SSL-TCP capabilities of Fast DDS.
Integration Service acts as a gateway to translate each system to DDS, which then makes the tunneling over SSL-TCP possible. A proper configuration of the destination router and firewalls allows the communication.
The example discussed here illustrates, specifically, how to configure Integration Service to achieve WAN communication between two separated ROS 2 instances. Notice, however, that any other applications from systems integrated in the Integration Service ecosystem could be bridged across the WAN, thanks to the Fast DDS System Handle TCP tunneling capabilities.
3.1.1. Requirements¶
To prepare the deployment and setup the environment, you need to have Integration Service correctly installed in your system. To do so, please follow the steps delineated in the Installation section.
Also, to test this example properly, you need two separate subnets that are not connected but both with internet access, or a testing environment simulating this scenario (for example, two routers, with one of them acting as an ISP for the second).
Notice that both the route tables and the NAT must be configured so as to ensure proper port redirection before starting the test.
Note
The IP addresses shown here only serve the purpose of illustrating the example. The important information is the real public IP of the server machine. Also, its router must enable the NAT to forward the listening port to the server.
Also, to get this example working, the following requirements must be met in both machines:
Having ROS 2 (Foxy or superior) installed, with the
talker-listenerexample working.Having the ROS 2 System Handle installed. You can download it from the ROS2-SH dedicated repository into the
is-workspacewhere you have Integration Service installed:cd ~/is-workspace git clone https://github.com/eProsima/ROS2-SH.git src/ROS2-SHHaving Fast DDS (v.2.0.0 or superior) installed.
Having the Fast DDS System Handle installed. You can download it from the FastDDS-SH dedicated repository into the
is-workspacewhere you have Integration Service installed:cd ~/is-workspace git clone https://github.com/eProsima/FastDDS-SH.git src/FastDDS-SH
After you have everything correctly installed, build the packages by running:
colcon build
Once the environment is prepared and tested (for example, using a port-scanner),
modify the file wan_config.xml inside the folder src/FastDDS-SH/examples/wan/
to match the IP address and port of with the WAN IP address and forwarded port of your environment.
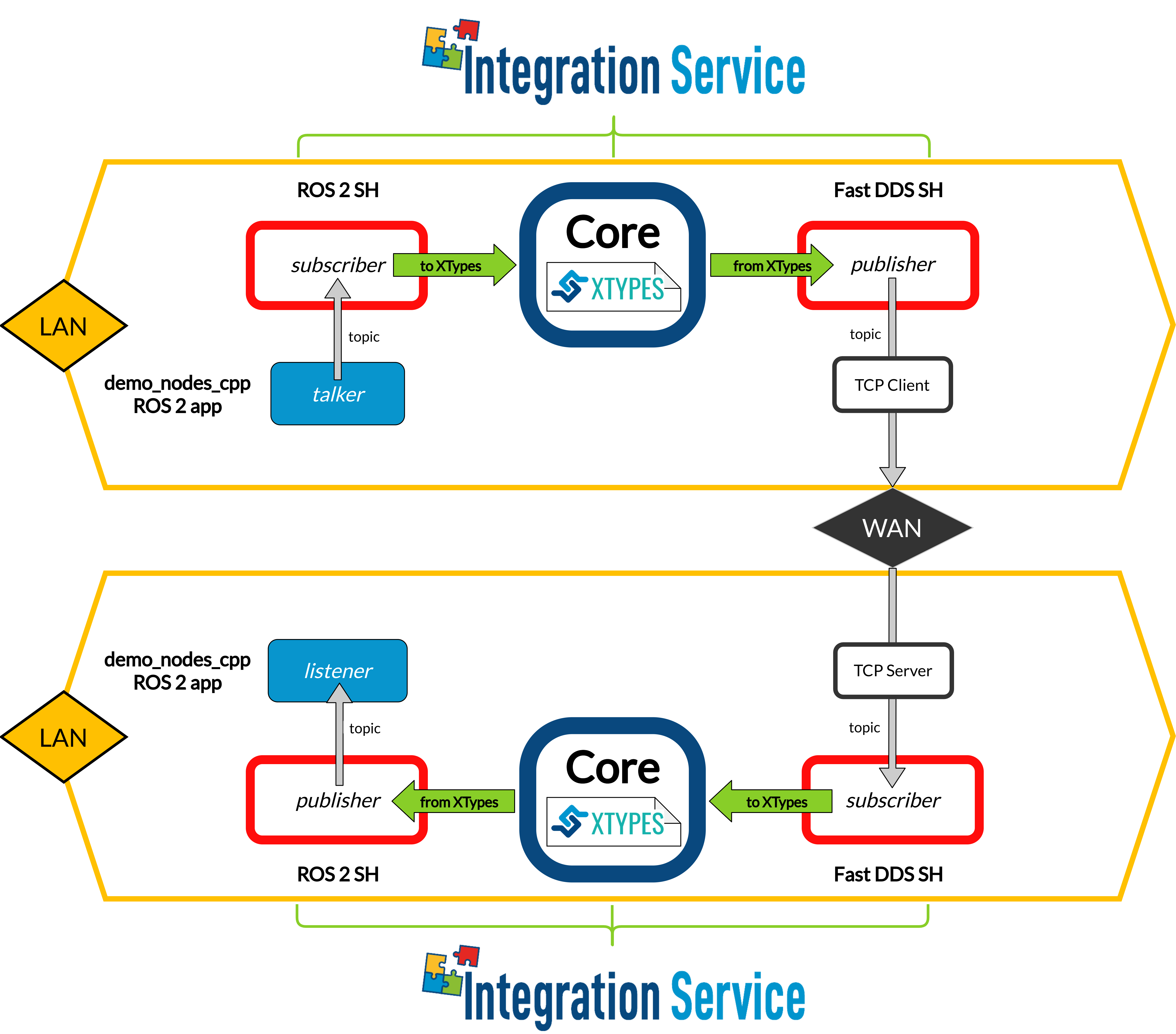
3.1.2. Deployment¶
This examples launches a ROS 2 talker in the server machine,
and a ROS 2 listener in the client machine.
An Integration Service instance will communicate these two applications by translating
the types and topics of ROS 2 to those of Fast DDS,
and then use the WAN-TCP communication capabilities of the latter to operate the tunneling.
To test it, open two terminals in each machine.
On the server side:
In the first terminal, source the ROS 2 installation and launch the ROS 2
talkerexample:source /opt/ros/$<ROS2_DISTRO>/setup.bash ros2 run demo_nodes_cpp talkerIn the second terminal, go to the
is-workspacefolder, source the ROS 2, Fast DDS, and local installations, and execute Integration Service with theintegration-servicecommand followed by the the server YAML configuration file located in thesrc/Integration-Service/examples/wan_tunneling/ros2__wan_helloworldfolder:cd ~/is-workspace source /opt/ros/$<ROS2_DISTRO>/setup.bash source install/setup.bash integration-service src/Integration-Service/examples/wan_tunneling/ros2__wan_helloworld/wan_server_talker.yaml
On the client side:
In the first terminal, launch the ROS 2
listenerexample:source /opt/ros/$<ROS2_DISTRO>/setup.bash ros2 run demo_nodes_cpp listenerIn the second terminal, go to the
is-workspacefolder, source the ROS 2, Fast DDS, and local installations, and execute Integration Service with theintegration-servicecommand followed by the the client YAML configuration file located in thesrc/Integration-Service/examples/wan_tunneling/ros2__wan_helloworldfolder:cd ~/dds-is-workspace source /opt/ros/$<ROS2_DISTRO>/setup.bash source install/setup.bash integration-service src/Integration-Service/examples/wan_tunneling/ros2__wan_helloworld/wan_client_listener.yaml
Once the two Integration Service instances match,
the ROS 2 talker-listener example will start to communicate.
Warning
If the example doesn’t work, review carefully your NAT configuration.