1.1.4. ROS 2 - WebSocket bridge¶
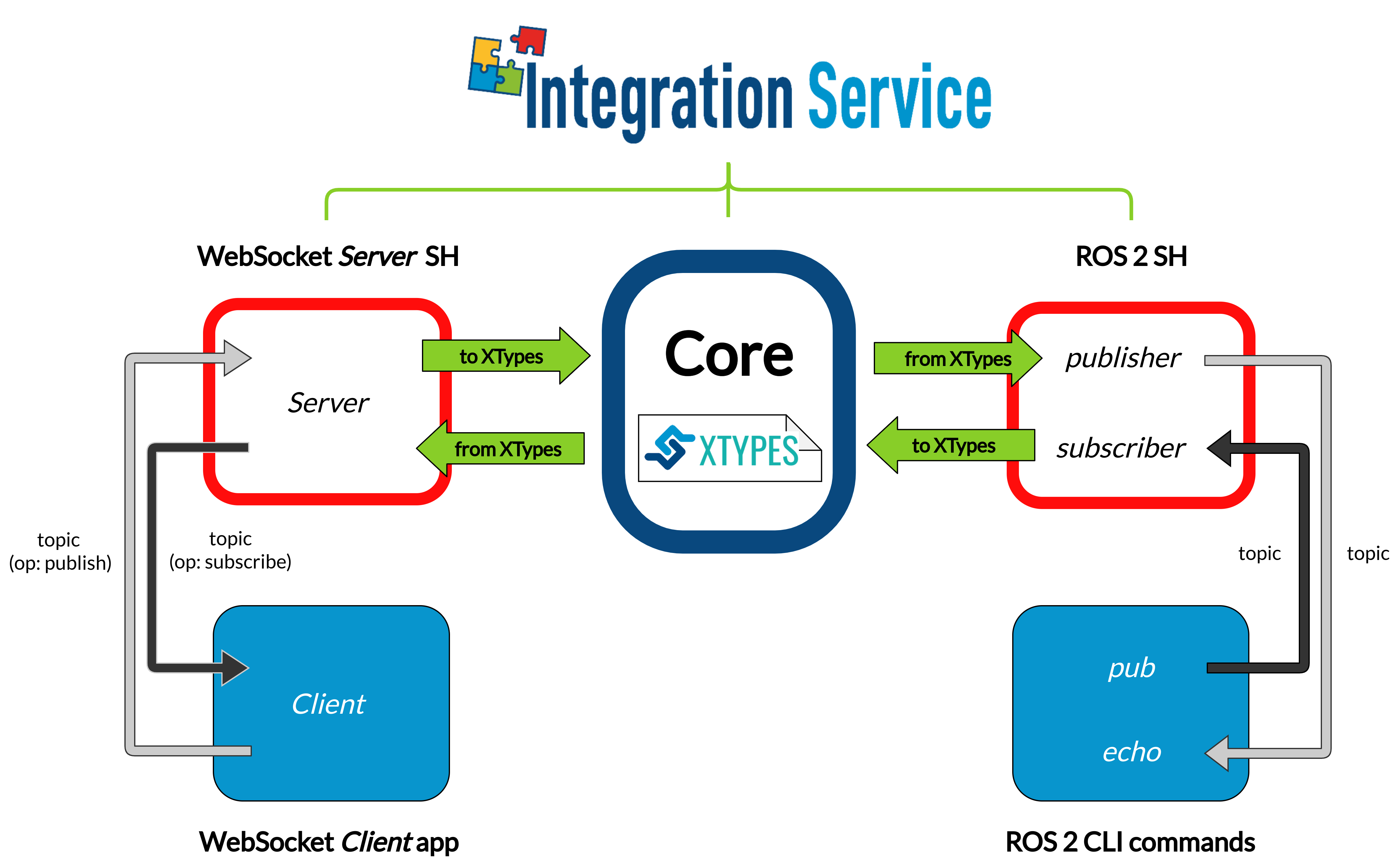
Another relevant use-case for Integration Service is that of connecting a WebSocket and a ROS 2 application
The examples detailed below addresses the situation of a ROS 2 talker-listener example
communicating with a WebSocket client.
1.1.4.1. Requirements¶
To prepare the deployment and setup the environment, you need to have Integration Service correctly installed in your system. To do so, please follow the steps delineated in the Installation section.
Also, to get this example working, the following requirements must be met:
Having ROS 2 (Foxy or superior) installed, with the
talker-listenerexample working.Having the ROS 2 System Handle installed. You can download it from the ROS2-SH dedicated repository into the
is-workspacewhere you have Integration Service installed:cd ~/is-workspace git clone https://github.com/eProsima/ROS2-SH.git src/ROS2-SHHaving OpenSSL and WebSocket++ installed:
apt install libssl-dev libwebsocketpp-dev
Having the WebSocket System Handle installed. You can download it from the WebSocket-SH dedicated repository into the
is-workspacewhere you have Integration Service installed:cd ~/is-workspace git clone https://github.com/eProsima/WebSocket-SH.git src/WebSocket-SH
After you have everything correctly installed in your is-workspace, build the packages by running:
colcon build
1.1.4.2. Deployment¶
Below we explain how to deploy an example of this communication in both directions allowed.
ROS 2 pub to WebSocket client¶
To enable communication from ROS2 to a WebSocket client, open two terminals:
In the first terminal, source your ROS 2 installation and execute a ROS 2
pub:source /opt/ros/$ROS2_DISTRO/setup.bash ros2 topic pub /hello_websocket std_msgs/msg/String “{data: Hello WebSocket}”
In the second terminal, go to the
is-workspacefolder, source the ROS 2 and local installations, and execute Integration Service with theintegration-servicecommand followed by the ros2_websocket__helloworld.yaml configuration file located in thesrc/Integration-Service/basicfolder:cd ~/is-workspace source /opt/ros/$ROS2_DISTRO/setup.bash source install/setup.bash integration-service src/Integration-Service/examples/basic/ros2_websocket__helloworld.yaml
Up to this point, the Integration Service should have created a WebSocket server application within the WebSocket System Handle, to listen and handle petitions coming from a WebSocket client.
We will now explain how to simply test the intercommunication between ROS 2 and a demo WebSocket client application, which can be found in websocket.org/echo webpage:
First, under the Location section, connect to the WebSocket server automatically deployed by the Integration Service. To do so, and since the example is being run without SSL security, copy and paste the following URL into the Location field text box, and press Connect:
ws://localhost:80
After this, you should see two WebSocket messages received automatically, due to the fact that the WebSocket Server hosted in the Integration Service detected an incoming connection: a subscribe operation message for the
hello_ros2topic; and an advertise operation for thehello_websockettopic.Since the ROS 2 talker to WebSocket client example is being tested, we must first send a subscribe operation request for the
hello_websockettopic. To do so, under the Message text box, enter the following and press Send:{"op": "subscribe", "topic": "hello_websocket", "type": "std_msgs/String"}
After this, in the Log you should receive the following message from ROS 2:
RECEIVED: {"msg":{"data":"Hello WebSocket"},"op":"publish","topic":"hello_websocket"}
WebSocket client to ROS 2 echo¶
To enable communication from a WebSocket client to ROS 2, open two terminals:
In the first terminal, source your ROS 2 installation and execute a ROS 2
echo:source /opt/ros/$ROS2_DISTRO/setup.bash ros2 topic echo /hello_ros2 std_msgs/msg/String
In the second terminal, go to the
is-workspacefolder, source the ROS 2 and local installations, and execute Integration Service with theintegration-servicecommand followed by the ros2_websocket__helloworld.yaml configuration file located in thesrc/Integration-Service/basicfolder:cd ~/is-workspace source /opt/ros/$ROS2_DISTRO/setup.bash source install/setup.bash integration-service src/Integration-Service/examples/basic/ros2_websocket__helloworld.yaml
Up to this point, the Integration Service should have created a WebSocket server application within the WebSocket System Handle, to listen and handle petitions coming from a WebSocket client.
We will now explain how to simply test the intercommunication between ROS 2 and a demo WebSocket client application, which can be found in websocket.org/echo webpage:
First, under the Location section, connect to the WebSocket server automatically deployed by the Integration Service. To do so, and since the example is being run without SSL security, copy and paste the following URL into the Location field text box, and press Connect:
ws://localhost:80
After this, you should see two WebSocket messages received automatically, due to the fact that the WebSocket Server hosted in the Integration Service detected an incoming connection: a subscribe operation message for the
hello_ros2topic; and an advertise operation for thehello_websockettopic.Since the WebSocket client to ROS 2 echo example is being tested, we must first send an advertise operation request for the
hello_ros2topic. To do so, under the Message text box, enter the following and press Send:{"op": "advertise", "topic": "hello_ros2”, "type": "std_msgs/String"}
After this, we can send individual messages from the WebSocket client, using the publish operation:
{"op": "publish", "topic": "hello_ros2", "msg": {"data": "Hello ROS 2"}}
The messages should be shown in the ROS 2 echo terminal.